How to architect a VSA, Nutanix or VSAN solution for the desired level of availability (i.e.: N+1 , N+2 etc) is a question I am asked regularly by customers and contacts throughout the industry.
This needs to be addressed in two parts.
1. Compute
2. Storage
Firstly, Compute level resiliency, As a cluster grows, the chances of a failure increases so the percentage of resources reserved for HA should increase with the size of the cluster.
My rule of thumb (which is quite conservative) is as follows:
1. N+1 for clusters of up to 8 hosts
2. N+2 for clusters of >8 hosts but <=16
3. N+3 for clusters of >16 hosts but <=24
4. N+4 for clusters of >24 hosts but <=32
The above is discussed in more detail in : Example Architectural Decision – High Availability Admission Control Setting and Policy
The below table highlights in Green my recommended HA percentage configuration based on the cluster size, up to the current vSphere limit of 32 nodes.

Some of you may be thinking, if my Nutanix or VSAN cluster is only configured for RF2 or FT1 for VSAN, I can only tolerate one node failure, so why am I reserving more than N+1.
In the case of Nutanix, after a node failure, the cluster can restore itself to a fully resilient state and tolerate subsequent failures. In fact, with “Block Awareness” a full 4 node block can be lost (so an N-4 situation) which if this is a requirement, needs to be considered for HA admission control reservations to ensure compute level resources are available to restart VMs.
Next lets talk about the issue perceived to be more complicated, Storage redundancy.
Storage redundancy for VSA, Nutanix or VSAN is actually not as complicated as most people think.
The following is my rule of thumb for sizing.
For N+1 , Ensure you have enough capacity remaining in the cluster to tolerate the largest node failing.
For N+2, Ensure you have enough capacity remaining in the cluster to tolerate the largest TWO nodes failing.
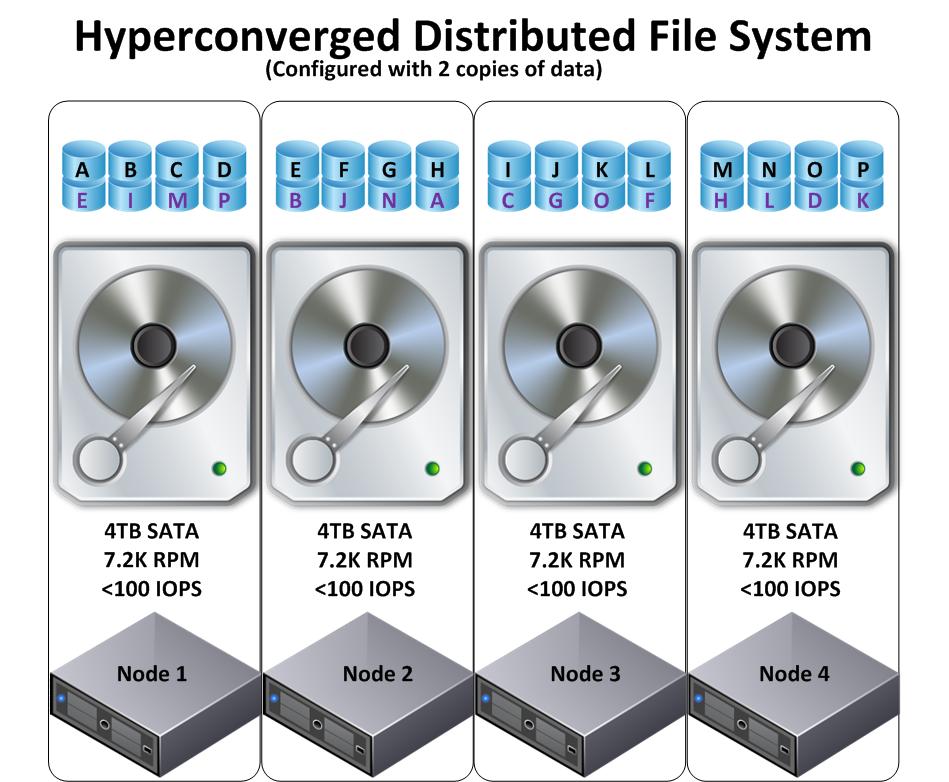
The examples below discuss Nutanix nodes and their capacity, but the same is applicable to any VSA or VSAN solution where multiple copies of data is kept for data protection, as opposed to RAID.
Example 1 , If you have 4 x Nutanix NX3060 nodes configured with RF2 (FT1 in VSAN terms) with 2TB usable per node (as shown below), in the event of a node failure, 2TB is no longer available. So the maximum storage utilization of the cluster should be <75% (6TB) to ensure in the event of any node failure, the cluster can be restored to a fully resilient state.

Example 2 , If you have 2 x Nutanix NX3060 nodes configured with RF2 (FT1 in VSAN terms) with 2TB usable per node and 2 x Nutanix NX6060 nodes with 8TB usable per node (as shown below), in the event of a NX6060 node failure, 8TB is no longer available. So the maximum storage utilization of the cluster should be 12TB to ensure in the event of any node failure (including the 8TB nodes), the cluster can be restored to a fully resilient state.

For environments using Nutanix RF3 (3 copies of data) or VSAN (FT2) the same rule of thumb applies but the usable capacity per node would be lower due to the increased capacity required for data protection.
Specifically for Nutanix environments, the PRISM UI shows if a cluster has sufficient capacity available to tolerate a node failure, and if not the following is displayed on the HOME screen and alerts can be sent if desired.

In this case, the cluster has suffered a node failure, and because it was sized suitably, it shows “Rebuild Capacity Available” as “Yes” and advises an “Auto Rebuild in progress” meaning the cluster is performing a fully automated self heal. Importantly no admin intervention is required!
If the cluster status is normal, the following will be shown in PRISM.

In summary: The smaller the cluster the higher the amount of capacity needs to remain unused to enable resiliency to be restored in the event of a node failure, the same as the percentage of resources reserved for HA in a traditional compute only cluster.
The larger the cluster from both a storage and compute perspective, the lower the unused capacity is required for HA, so as has been a virtualization recommended practice for years….. Scale-out!
Related Articles:
1. Scale Out Shared Nothing Architecture Resiliency by Nutanix
2. PART 1 – Problems with RAID and Object Based Storage for data protection
3. PART 2 – Problems with RAID and Object Based Storage for data protection